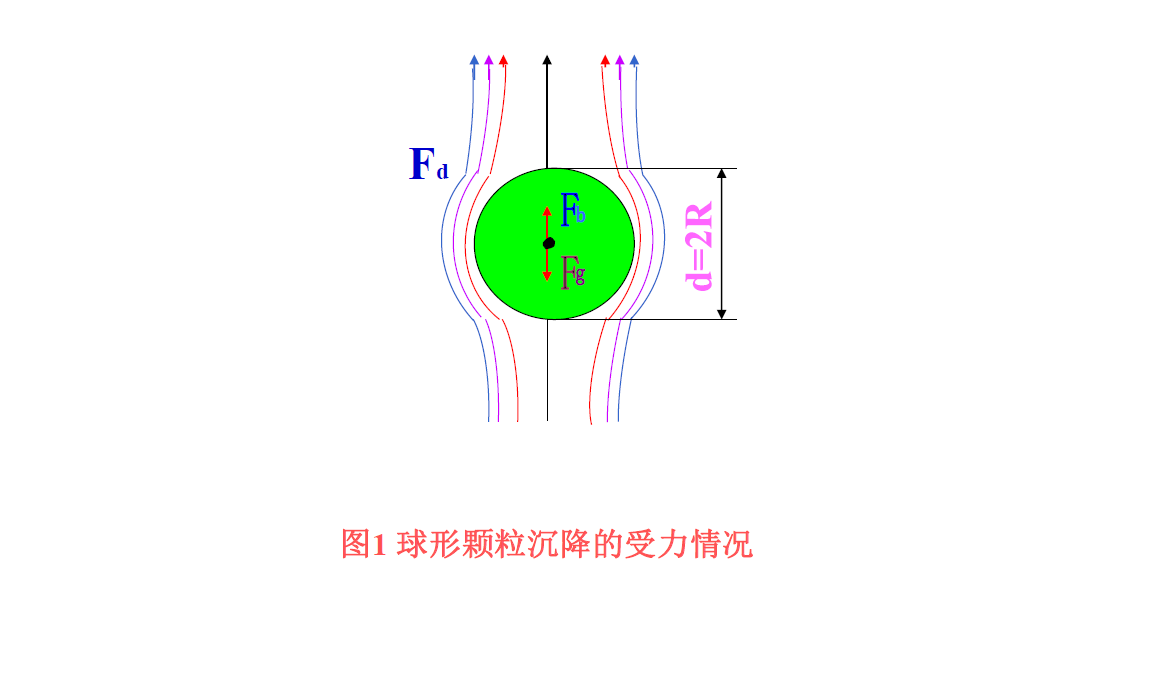
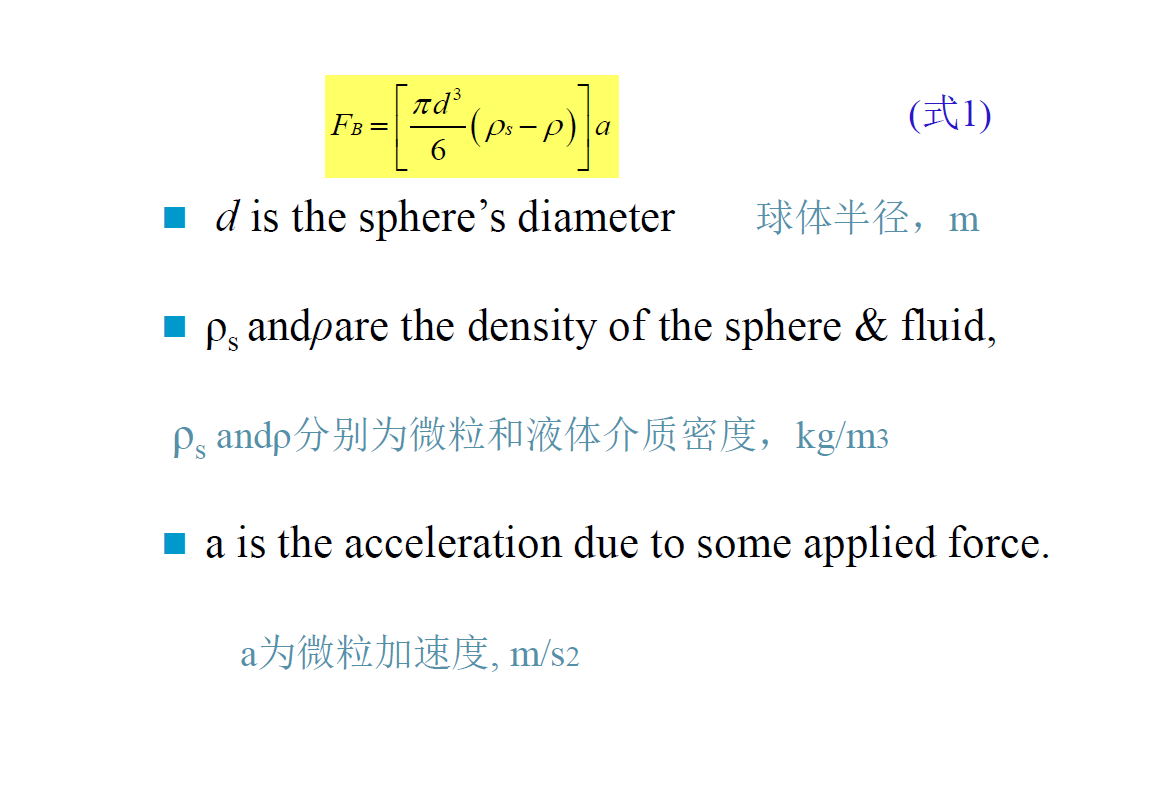
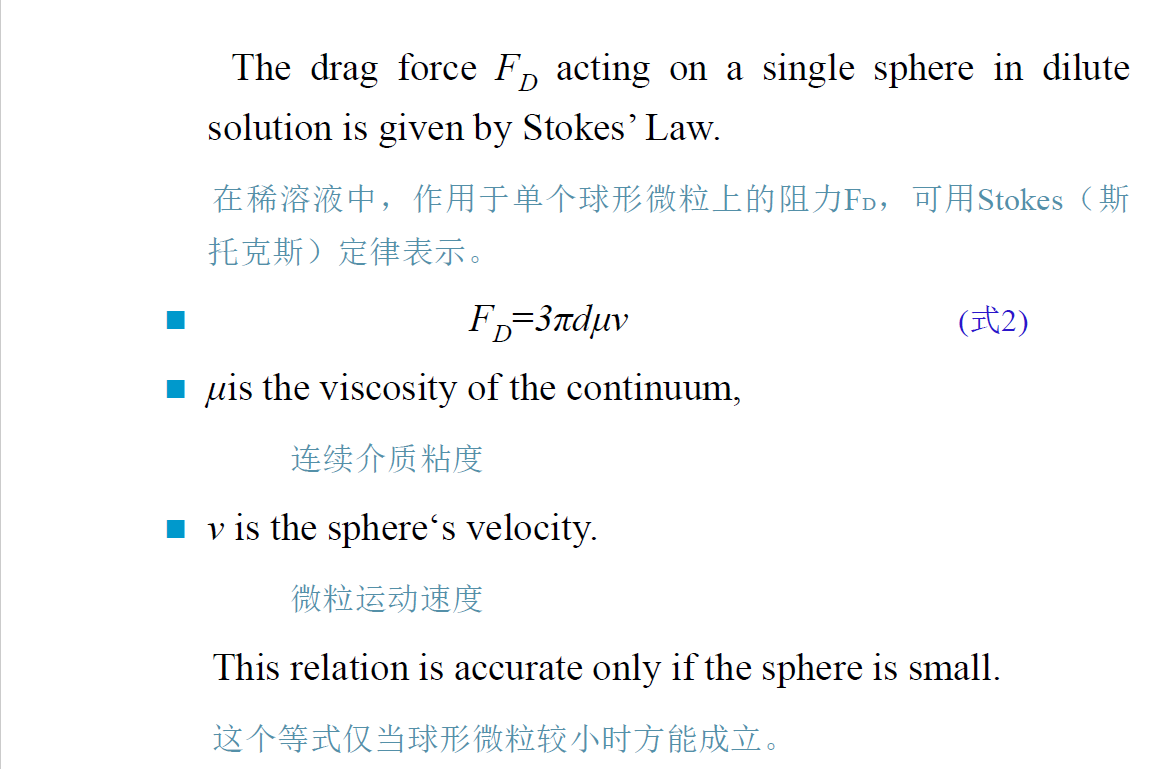
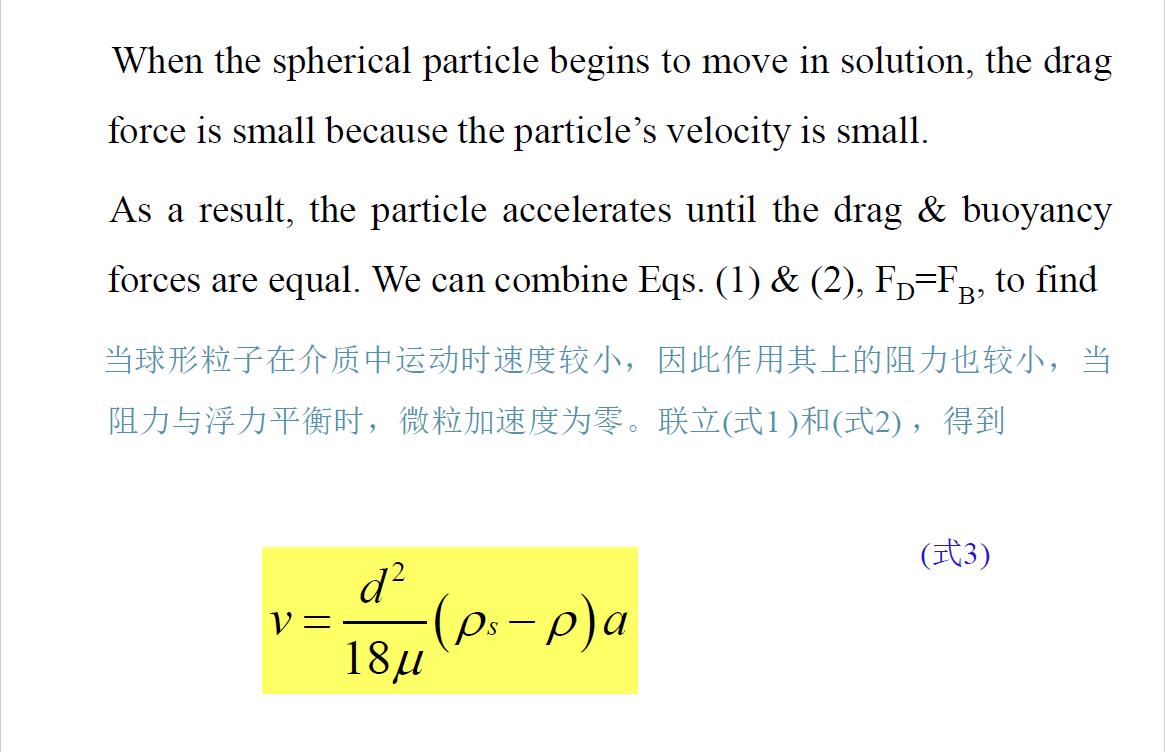
syms FB pi d ps p a; FB=(pi*d^3/6*(ps-p))*a; syms FD u v FD=3*pi*d*u*v; solve(FD-FB==0,v)
3.10.1. 代码推导
3.10.1.2. 离心推导(方法2)